
Động cơ bước chủ yếu làcác thứ điện, hiện đang rất được sử dụng rộng thoải mái trong các nghành nghề công nghiệp có dùng tinh chỉnh và điều khiển vị trí. Vậy, tinh chỉnh và điều khiển động cơ bước gồm khó không, làm gắng nào new đúng chuẩn? bên dưới đây, mời chúng ta cùng khám phá về khái niệm, nguyên tắc hoạt động, các đặc tính cũng như cách tinh chỉnh động cơ cách sao cho kết quả nhất.
Bạn đang xem: Điều khiển tốc độ động cơ bước
1. Mày mò khái niệm motor bước
Trước khi khám phá về cách điều khiển và tinh chỉnh động cơ bước, bọn họ cần nắm vững khái niệm bộ động cơ bước là gì? Đâylà 1 các loại động cơ gồm khả năng biến đổi các tín hiệu tinh chỉnh ở bên dưới dạng những xung năng lượng điện rời rạc biến chuyển thiên tiếp đến nhau biến hóa các hoạt động ở góc quay hoặc các chuyển động của roto. Loại động cơ này có khả năng cố định roto của dòng sản phẩm vào đúng các vị trí yêu cầu thiết.
Động cơ cách giúp cố định và thắt chặt roto của máy vào đúng các vị trí yêu cầu thiết
Các thông số kỹ thuật cơ bản để chọn được một mạch tinh chỉnh và điều khiển động cơ cách 4 dây tương thích gồm có:
Loại motor gồm những: loại trục, các loại lỗ,..Momen xoắn dùng để giữ max.Dòng điện định nút có các thông số: 0.75A/ pha, 1.4A/ pha, 2.8A/ phaSố lượng pha: 2p, 5p
Kích thước của khung motor bước: 2 (24mm), 4 (42mm), 6 (60mm) với 9 (85mm).Chiều dài của motor bước: 3 (33mm), 5 (46.5 - 47mm), 6 (59.5mm) cùng 9 (98mm).
2. Các đặc tính cơ bản cần lưu giữ của hộp động cơ bước
a) Đặc tính rượu cồn của động cơ bước
Đặc tính tốc độ – mô men: Đặc tính này được xác định bởi hộp động cơ cùng với cỗ điều khiển, và nó cũng bị tác động rất nhiều vì loại thiết bị tinh chỉnh mà bạn sử dụng.
Đặc tính tải theo quán tính và tần số bắt đầu: Điều này cho biết tần số khởi động chất nhận được của hộp động cơ sẽ bớt khi sở hữu quán tính của chính nó tăng lên. Những giá trị này còn được chuyển đổi theo tốc độ xung, nhưng động cơ bước vẫn tất yêu tuân theo vận tốc xung nếu như nó vượt vượt một điểm độc nhất vô nhị định, vì như vậy sẽ dẫn tới sự việc đi không nên bước.
Đặc tính tất cả độ rung: Khi tinh chỉnh và điều khiển vi bước step motor, hộp động cơ bước quay mà lại trên thực tiễn là thực hiện không hề ít bước tất cả phản hồi, từng bước một còn được thể hiện bởi các giai đoạn nạm thể, chi tiết.
b) Đặc tính tĩnh của hộp động cơ bước
Đặc tính mômen và góc: Khi điều khiển step motor, quan hệ giữa nút độ dịch rời góc của rôto cùng mômen sẽ khởi tạo ra lực công dụng lên trục đụng cơ, trong lúc đó, hộp động cơ còn được kích thích vị một loại điện định mức.
Độ đúng mực của góc: Trong đk động cơ chạy không tải, nó sẽ có độ đúng đắn của góc trong vào mức 0,05˚. Độ đúng mực góc của hộp động cơ bước thường thì được biểu hiện bằng độ chính xác của địa điểm dừng.
Độ đúng chuẩn của địa chỉ dừng: điều đó thể hiện tại sự khác hoàn toàn giữa địa điểm dừng động cơ theo mong ước và vị trí dừng theo thực tế.
Trong điều kiện thực tế của mạch điều khiển và tinh chỉnh động cơ bước 6 dây, động cơ bước luôn tồn tại ma sát. Nếu sở hữu trọng của ma cạnh bên không thay đổi thì góc di chuyển sẽ ko đổi đối với tất cả mọi hoạt động một chiều. Mặc dù nhiên, vào khi vận động hai chiều, không đúng số góc có thể tăng lên vội vàng đôi.
3. Nguyên tắc điều khiển và tinh chỉnh động cơ bước hoạt động như rứa nào
Có thể áp dụng quy tắc bàn tay yêu cầu để điều khiển động cơ bước như sau: nuốm bàn tay phải, rồi để bàn tay sao để cho bốn ngón tay hướng theo chiều của cái điện chạy qua những vòng dây. Khi đó, ngón tay cái choãi ra sẽ chỉ chiều của đường sức từ bên phía trong lòng ống dây.
Nguyên lý hoạt động cơ phiên bản của motor bước: khi chúng ta cấp năng lượng điện vào vào cuộn dây của stato, cuộn dây này sẽ đóng vai trò chính là một nam châm từ điện. Nó sẽ tạo ra lực tác động, từ đó làm quay roto.
Khi tinh chỉnh và điều khiển động cơ cách 5 dây, thừa trình đổi khác thứ tự cung ứng điện cho các cuộn dây của stato sẽ làm cho trình tự cù của roto bị vậy đổi. Việc đổi khác thứ trường đoản cú của quy trình chuyển mạch sẽ địa thế căn cứ vào mạch năng lượng điện tử.
Có thể áp dụng quy tắc bàn tay yêu cầu để tinh chỉnh động cơ bước
4. Sơ đồ với cách điều khiển và tinh chỉnh động cơ bước
Khi nói tới cách tinh chỉnh và điều khiển động cơ bước, các các bạn sẽ thường nhắc tới cách mạch điều khiển động cơ cách 6 dây, 4 dây hoặc 5 dây,… mặc dù nhiên, ngơi nghỉ đây họ sẽ đi kiếm hiểu cụ thể hơn về gốc rễ của quy trình điều khiển động cơ bước ra sao, làm như vậy nào, sử dụng phương thức điều khiển gì kết quả nhất?
Cần biết rằng, từng một loại hộp động cơ bước thông thường sẽ sở hữu được các đặc đường khác nhau, do vậy cách tinh chỉnh của từng loại cũng trở thành khác nhau. Tùy thuộc vào khả năng kéo (mô men lực) và tốc độ quay yêu cầu của motor cách mà chúng ta cũng có thể thiết lập chương trình điều khiển động cơ cách sau đây:
Trường hợp đối với những hộp động cơ bước chỉ việc chạy ở vận tốc thấp thì chúng ta sử dụng cách thức điều khiển bằng phương pháp cấp năng lượng điện áp trực tiếp. Chính nội trở vào cuộn dây của động cơ sẽ sản hiện ra một loại điện nhưng ở đó giới hạn dòng năng lượng điện này sẽ nhờ vào vào điện áp được cấp trực tiếp vào động cơ bước.Trường hòa hợp step motor và mạch điều khiển và tinh chỉnh chạy ở vận tốc cao: trường hợp các bạn có nhu cầu tiếp tục sử dụng phương pháp cung cung cấp điện áp trực tiếp vào động cơ bước thì lực kéo (mô men lực) có khả năng sẽ bị giảm sút nghiêm trọng. Cũng chính vì đặc tuyến cảm của cuộn dây sẽ khởi tạo ra một lực để kìm hãm khả năng, tính năng của cái điện.Một thực tế cho thấy thêm là vào cách điều khiển động cơ bước bằng cách cấp điện trực tiếp sẽ làm cho động cơ và mạch tinh chỉnh động cơ bước rất nóng.Trường hợp chúng ta cần cải thiện và nâng cấp hiệu suất làm việc của mạch điều khiển motor bước ở tốc độ thấp, đồng thời nên tăng vận tốc cao lên thì nên cần sử dụng phương pháp điều khiển bằng cách băm xung. Khi điều khiển động cơ bước dựa vào băm xung nhằm duy trì được tần số không đổi. Tùy theo nguyên tắc duy trì dòng năng lượng điện chạy qua những cuộn dây của hễ cơ cũng sẽ không đổi mặc dù ở các cấp độ. Cách tinh chỉnh này còn được gọi là cách thức điều khiển theo dòng điện.Thực tế còn cho thấy, cách điều khiển động cơ bước bằng phương pháp băm xung sẽ giúp đỡ cho hộp động cơ bước vận động mạnh mẽ hơn, êm hơn và nhất là ít rét hơn.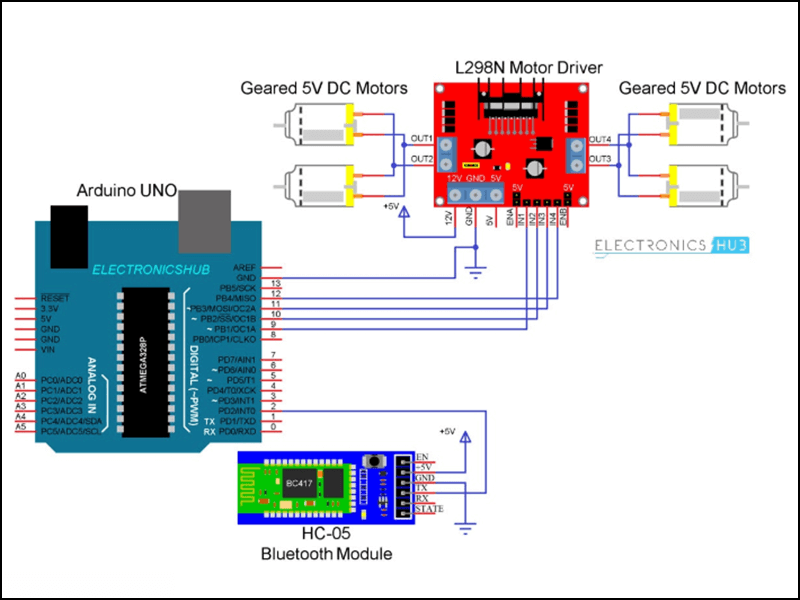
Sơ đồ với cách tinh chỉnh động cơ bước
5. Điều khiển động cơ bước dùng Code Arduino với A4988
Để tinh chỉnh và điều khiển động cơ bước Arduino, các bạn cần chuẩn bị:
Động cơ Arduino UNOĐộng cơ NEMA17 Stepper MotorA4988 Driver Module
Tụ năng lượng điện 47µf (giúp đảm bảo an toàn board điều khiển, né khỏi những xung năng lượng điện áp)Biến trở
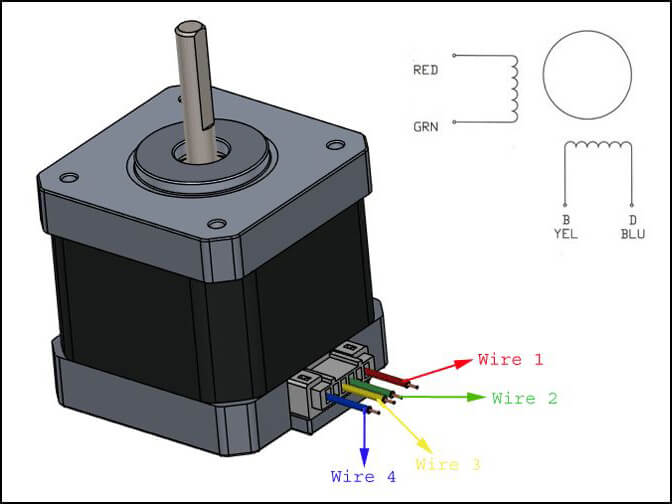
Động cơ cách NEMA17 có 6 dây
Động cơ chuyển động ở 12V (Góc phi vào khoảng 1.8 độ và 10 - 40 °C.
Sơ đồ dùng chân của bộ động cơ bước NEMA 17:
Module tinh chỉnh động cơ cách A4988A4988 đó là driver điều khiển và tinh chỉnh động cơ bước có size cực kỳ nhỏ gọn, cung ứng được nhiều chế độ làm việc, bên cạnh đó nó còn điều chỉnh được mẫu điện ra mang đến động cơ, đặc biệt auto ngắt năng lượng điện khi bộ động cơ quá nóng.Công suất năng lượng điện của ngõ ra: 8 – 35V, 2ACó 5 chính sách bao gồm: 1/2, 1/4, 1/8, 1/16 bướcĐiều chỉnh dòng điện đi ra bằng chiết áp
Tự hễ ngắt điện khi động cơ bị thừa nhiệt
Cách điều khiển động cơ bước:
Có 5 chính sách cho các bạn lựa chọn, nếu như khách hàng không ý muốn mạch điều khiển động cơ bước chạy không thiếu 200 bước/ vòng. Tốt nhất, bọn họ nên chạy cho không hề thiếu mà ko cần suy xét 3 chân này, tiếp nối sẽ kiểm soát và điều chỉnh bước của thiết yếu động cơ trong hệ thống code.
MS1 | MS2 | MS3 | Microstep Resolution |
Low | Low | Low | Full Step |
High | Low | Low | ½ Step (Half Step) |
Low | High | Low | ¼ Step (Quarter Step) |
High | High | Low | 1/8 Step (Eighth Step) |
High | High | High | 1/16 Step (Sixteenth Step) |
Kết nối theo cặp trộn của bộ động cơ bước mang đến 2 cặp 1A - 1B cùng cặp 2A - 2B
Code:Các các bạn hãy triển khai nạp code này vào Arduino IDE nhằm thử nghiệm (nhưng hãy nhớ cài đặt cho thư viện bộ động cơ bước nhé)Tiếp theo, trong vòng loop, chúng ta hãy thực hiện đọc chân của trở nên trở để biến hóa sao đến mức căn vặn của vươn lên là trở rơi vào trong vòng từ 0 - 500 là được. đối chiếu giá trị của chúng khi chỉnh biến hóa trở, trường đúng theo nếu nó lớn hơn giá trị trước đó (vặn theo hướng kim đồng hồ) thì động cơ sẽ cấp tốc chóng dịch chuyển 10 bước, quay theo chiều kim đồng hồ. Nếu giá trị nhận được nhỏ tuổi hơn quý hiếm trước đó (vặn con quay ngược kim đồng hồ) thì bộ động cơ sẽ lập tức dịch chuyển 10 bước theo hướng ngược chiều kim đồng hồ.Kết luận
Thông qua nội dung bài viết trên đây, chúng tôi đã ra mắt đến các bạn nguyên lý cũng tương tự cách tinh chỉnh động cơ bước dùng Arduino với A4988 driver. Chúng ta cần lựa chọn mua thành phầm tại địa chỉ uy tín cũng như chú ý đọc thật cẩn thận các thông số của chúng trước khi sử dụng nhé.
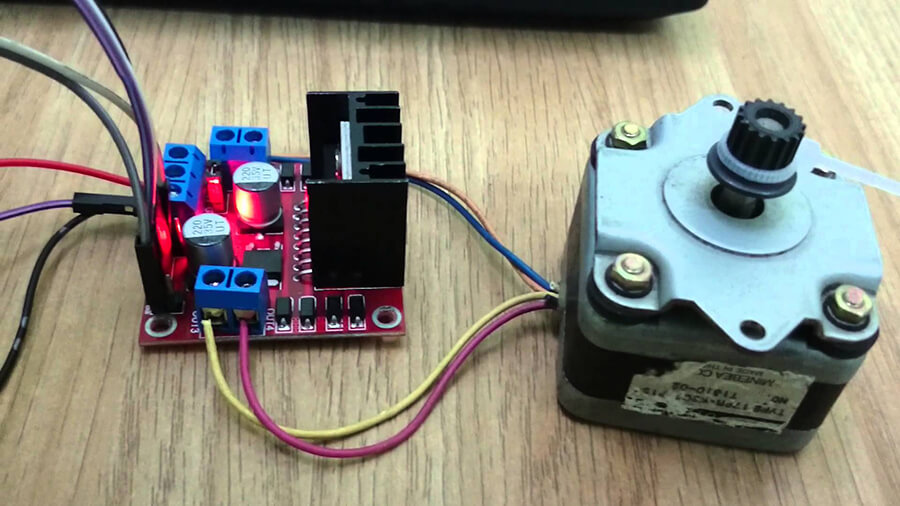
Nếu bạn đang xuất hiện ý định sử dụng động cơ cách (Step Motor) trong các dự án như Robot, xe từ bỏ hành…Thì nội dung bài viết này giành cho bạn. Bài viết hôm nay đã hướng dẫn chi tiết cách thực hiện module tinh chỉnh động cơ DC L298N với Arduio để điều khiển bộ động cơ bước.
Thông qua bài xích viết, các bạn sẽ biết được cách tinh chỉnh động cơ bước bởi mạch mong H. Trước lúc đi vào bài viết các bạn có thể tìm đọc bài viết chi tiết về phong thái sử dụng Module L298N do mình xuất bạn dạng trước đó.
Điều khiển hộp động cơ bước (Step Motor) bởi mạch cầu H
Module L298N gồm hai mạch mong H.Mỗi mạch mong H dùng làm điều khiển một trong số cuộn dây điện từ của động cơ bước (Step Motor).
Một mạch cầu H dễ dàng gồm 4 transitor (thường là transistor NPN) và các resistor điều chỉnh dòng điện. Các transitor được kết hợp theo kết cấu đặc biệt để tạo ra các tinh thần hoạt động: hoạt động thẳng, đi lùi và dừng.
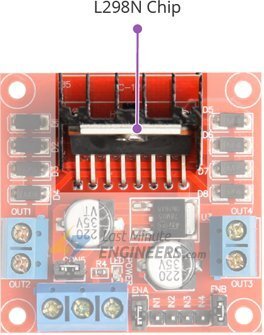
IC tinh chỉnh và điều khiển động cơ DC L298N
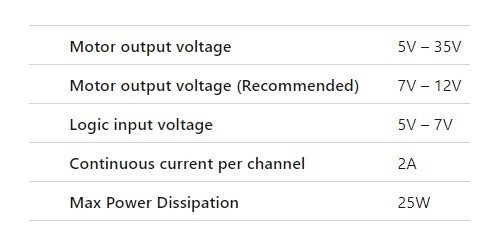
Module L298N là 1 trong những module tinh chỉnh và điều khiển động cơ DC hai chiều được tích đúng theo IC L298. Nó được thiết kế để hỗ trợ việc điều khiển step motor arduino với chiếc điện cao và khả năng tương say mê với nguồn cấp lên đến mức 46V và cái điện về tối đa lên tới mức 2A cho mỗi kênh động.
IC này giúp kiểm soát và điều chỉnh dòng điện và hướng chuyển động của động cơ bước bằng phương pháp sử dụng mạch ước H kép. Nó có thể chấp nhận được tăng vận tốc (PWM) và đảo hướng chuyển động của đụng cơ. Để tinh chỉnh và điều khiển IC L298N, ta sử dụng những chân nguồn vào từ Arduino để điều chỉnh dòng điện cùng hướng hoạt động của đụng cơ.
Chân nguồn cung cấp cho động cơ (Power Pins)
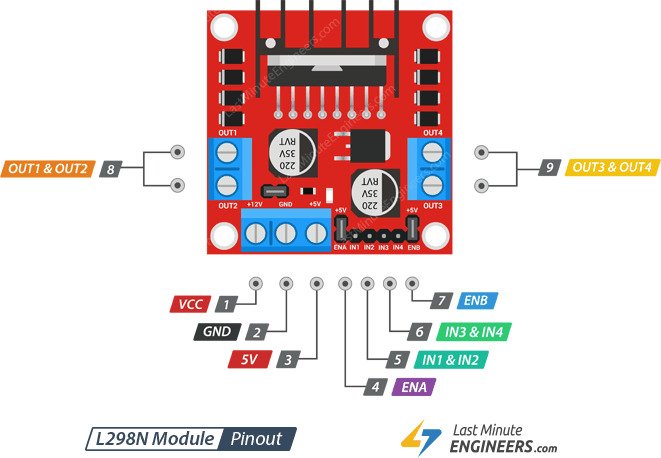
Module điều khiển và tinh chỉnh động cơ DC L298N arduino tất cả 2 chân cung cấp nguồn nguồn vào là VS và VSS.
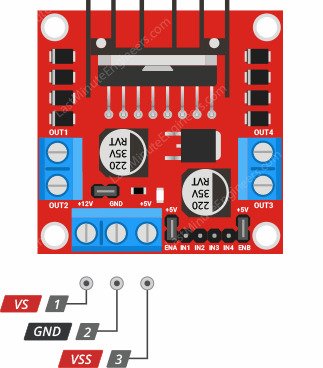
VS: Chân cung ứng nguồn cho mạch mong H của IC. Điện áp đầu vào hoàn toàn có thể từ 5V mang đến 12V.
Xem thêm: Bắn Cá Trên Máy Tính Online
VSS: Chân cung cấp nguồn mang lại mạch xúc tích và ngắn gọn của IC L298N. Điện áp nguồn vào nằm trong vòng từ 5V đến 7V.GND: Chân nối đất (Ground) của mạch.Chân áp ra output (Output Pins)
Các cổng đầu ra của module điều khiển động cơ L298N mang đến Arduino được xếp theo sản phẩm tự: OUT1 với OUT2 cho hộp động cơ A với OUT3 cùng OUT4 cho hộp động cơ B. Chúng ta có thể sử dụng hai động cơ DC gồm điện áp trường đoản cú 5V mang đến 12V.
Đầu ra bên trên module L298N có công dụng chịu tải lên tới 2A cho mỗi động cơ DC. Mặc dù nhiên, số lượng giới hạn này còn phụ thuộc vào công suất của nguồn cấp cho đụng cơ.
Chân tinh chỉnh hướng di chuyển (Direction Control Pins)
Module điều khiển và tinh chỉnh động cơ L298N Arduino có các chân tinh chỉnh và điều khiển hướng, đến phép biến đổi hướng chuyển động của cồn cơ, ví dụ như đi thẳng hoặc lùi. Nguyên tắc hoạt động của module dựa trên việc điều khiển và tinh chỉnh các công tắc nguồn của mạch cầu H bên trong IC L298N.
Cụ thể, module tinh chỉnh và điều khiển động cơ L298N Arduino tất cả hai chân điều khiển hướng. IN1 và IN2 tinh chỉnh và điều khiển hướng hoạt động của động cơ A, trong những lúc IN3 cùng IN4 tinh chỉnh và điều khiển hướng hoạt động của bộ động cơ B.
Để điều khiển và tinh chỉnh hướng chuyển động của động cơ step, chúng ta có thể áp dụng logic mức CAO (5V) hoặc xúc tích mức THẤP (GND). Bảng thông số tiếp sau đây sẽ cho bạn thấy các vận động tương ứng khi kết hợp các cặp đầu vào:
Điều này được cho phép bạn kiểm soát điều hành hướng hoạt động của bộ động cơ bước bằng phương pháp điều chỉnh tâm trạng logic của các chân tinh chỉnh và điều khiển tương ứng.
Chân điều khiển vận tốc (Speed Control Pins)
Các chân điều khiển tốc độ ENA và ENB được sử dụng để bật/tắt bộ động cơ và điều khiển tốc độ quay của động cơ.
Khi đặt các chân này ở tại mức CAO, bộ động cơ sẽ quay; khi đặt ở tầm mức THẤP, hộp động cơ sẽ dừng lại. Mặc dù nhiên, bằng cách sử dụng PWM (Pulse Width Modulation), chúng ta có thể điều khiển vận tốc của cồn cơ.
Trên module L298N Arduino, bao gồm một jumper được gặm sẵn. Khi jumper này được kết nối, các động cơ đã quay với vận tốc tối đa. Nếu bạn có nhu cầu điều khiển tốc độ của rượu cồn cơ trải qua chương trình, hãy tháo vứt jumper này và kết nối những chân cung cấp ~PWM trên Arduino. Điều này được cho phép bạn sử dụng PWM để điều chỉnh tốc độ quay của hộp động cơ theo ý muốn.
IC ổn định áp 5V 78M05
Module được tích hợp một IC ổn áp 5V 78M05 và rất có thể bật/tắt thông qua 1 jumper.
Khi jumper được cắm, IC ổn áp 78M05 vẫn hoạt động, cùng chân VSS sẽ được hỗ trợ nguồn từ bỏ VS của hễ cơ. Trong trường hợp này, đầu vào 5V sẽ đóng mục đích là nguồn cung cấp 5V 0.5A. Chúng ta cũng có thể sử dụng nó để cấp cho nguồn mang đến Arduino hoặc các thành phần khác.
Khi dỡ jumper, IC 78M05 sẽ bị tắt, và các bạn phải cung cấp nguồn 5V đơn lẻ thông qua chân VSS.
Hướng dẫn cách xác minh các trộn của bộ động cơ bước (Step Motor)
Trước khi bước đầu nối hộp động cơ với module, chúng ta cần xác minh các trộn của động cơ bước đang sử dụng. Cách tốt nhất có thể là tìm Datasheet của hộp động cơ này nhằm đọc.
Nếu trong trường họp không tìm kiếm được datasheet các bạn có thể sử dụng thủ thuật sau.
Sử dụng đồng hồ đeo tay vạn năng, xoay kim đồng hồ ở cơ chế ‘điện trở’ cùng đo năng lượng điện trở của các cặp dây.Nếu điện trở chỉ vài ohm (Hai dây sót lại sẽ là cặp sản phẩm công nghệ hai .
Linh kiện cần thiết cho dự án
| TÊN LINH KIỆN | SỐ LƯỢNG | NƠI BÁN |
| Arduino Uno R3 | 1 | Shopee | Cytron |
| Module tinh chỉnh và điều khiển động cơ DC L298N | 1 | Shopee | Cytron |
| Động cơ cách NEMA 17 | 1 | Shopee | Cytron |
| Dây cắm | 10-20 | Shopee | Cytron |
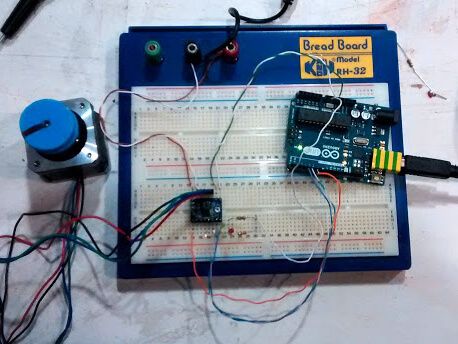
Sơ đồ gia dụng đấu nối động cơ bước NEMA 17 với Module tinh chỉnh động cơ L298N cùng Arduino
Trong dự án này mình sẽ thực hiện một động cơ bước NEMA 17 chuyển động ở năng lượng điện áp là 12V.Do đó, bản thân sẽ cấp nguồn năng lượng điện 12V chân VS của mạch tinh chỉnh và điều khiển động cơ DC L298N.
Tiếp theo, để cấp cho nguồn 5V đến mạch ngắn gọn xúc tích của L298N, các bạn giữ nguyên Jumper được cắn sẵn bên trên mạch.
Để mang đến Step Motor hoạt động ở mức buổi tối đa, các bạn cũng cần giữ nguyên cả nhị jumper ENA với ENB.
Các chân đầu vào (IN1, IN2, IN3 và IN4) của module L298N tương tư chân cổng đầu ra Digital Arduino (8, 9, 10 và 11).
Cuối cùng, nối những pha của đụng cơ phi vào (OUT1 cùng OUT2) và pha còn sót lại vào (OUT3 cùng OUT4).Các chúng ta không cần lưu ý đến cực của cồn cơ.
Code Arduino: Điều khiển động cơ bước NEMA 17
// Include the Arduino Stepper Library#include // Number of steps per đầu ra rotationconst int steps
Per
Revolution = 200;// Create Instance of Stepper library
Stepper my
Stepper(steps
Per
Revolution, 8, 9, 10, 11);void setup()// mix the tốc độ at 60 rpm:my
Stepper.set
Speed(60);// initialize the serial port:Serial.begin(9600);void loop() // step one revolution in one direction:Serial.println("clockwise");my
Stepper.step(steps
Per
Revolution);delay(500);// step one revolution in the other direction:Serial.println("counterclockwise");my
Stepper.step(-steps
Per
Revolution);delay(500);
Giải say đắm code
// Include the Arduino Stepper Library#include Khai báo tủ sách Stepper để sử dụng.// Number of steps per đầu ra rotationconst int steps
Per
Revolution = 200;Khai báo biến hóa steps
Per
Revolution là số bước (steps) cho mỗi vòng cù của động cơ. Trong trường hợp này, số bước là 200.
// Create Instance of Stepper library
Stepper my
Stepper(steps
Per
Revolution, 8, 9, 10, 11);Tạo một đối tượng người tiêu dùng my
Stepper trường đoản cú lớp Stepper, với những tham số truyền vào là steps
Per
Revolution và những chân Arduino kết nối đến hộp động cơ (8, 9, 10, 11).
void setup()// phối the speed at 60 rpm:my
Stepper.set
Speed(60);// initialize the serial port:Serial.begin(9600);Trong hàm setup(), đặt vận tốc quay của hễ cơ bằng phương pháp gọi thủ tục set
Speed() của đối tượng my
Stepper. Trong trường hợp này, vận tốc là 60 rpm (vòng quay từng phút). Khởi chế tạo cổng serial để giao tiếp với vật dụng tính.
void loop() // step one revolution in one direction:Serial.println("clockwise");my
Stepper.step(steps
Per
Revolution);delay(500);// step one revolution in the other direction:Serial.println("counterclockwise");my
Stepper.step(-steps
Per
Revolution);delay(500);Trong hàm loop(), thực hiện một vòng xoay theo chiều kim đồng hồ thời trang và tiếp đến một vòng xoay ngược chiều kim đồng hồ của bộ động cơ bước. Mỗi vòng quay được thực hiện bằng phương pháp gọi cách thức step() của đối tượng người dùng my
Stepper với tham số là steps
Per
Revolution để quay theo chiều dương với steps
Per
Revolution nhằm quay theo hướng âm. Hàm delay() được áp dụng để tạo khoảng thời gian chờ giữa các vòng quay.








